<del id="aymay"></del> 本文選用當今最為流行、應用最廣泛的雷達和紅外作為傳感器,在紅外/雷達雙模導引頭的多傳感器平臺下展開研究,設計并仿真實現了更接近真實的軍事與民用環境的多模型機動目標跟蹤算法。仿真結果驗證了該算法跟蹤性能的有效性。
0 引言
隨著信息技術的快速發展和現代軍事及民用需求的不斷提高,對目標跟蹤的精度也相應地提出了更高的要求。在真實的目標跟蹤系統中,目標的狀態總是處在不斷變化中,當目標真實運動模型與算法模型不匹配時,跟蹤精度會明顯下降,此時采用多模型(MulTIpleModel,MM)機動目標跟蹤算法將會成為最佳選擇。然而,當今的多模型目標跟蹤方法大都停留在理論層面,對于多模型的實際應用價值及各模型的應用場合都需要做進一步的研究。
本文選用當今最為流行、應用最廣泛的雷達和紅外作為傳感器,在紅外/雷達雙模導引頭平臺下開展對交互式多模型機動目標跟蹤算法的研究,并加入噪聲干擾,更接近真實的軍事與民用環境。首先搭建紅外/雷達雙模導引頭仿真平臺,進而設計基于多傳感器的多模型機動目標跟蹤算法,采用擴展卡爾曼濾波,最終實現算法的軟件仿真及跟蹤性能評估,驗證了所設計方法的有效性和實用性。
1 多傳感器平臺搭建
雷達和紅外傳感器是目前常用的兩種目標探測和跟蹤傳感器,采用雷達為主、紅外成像傳感器探測為輔的信息融合系統進行目標跟蹤能夠使系統降低對敵方干擾的脆弱性,提高系統可靠性,現已廣泛應用于各個領域。因此,本文選取雷達與紅外雙模導引頭作為傳感器,模擬生成多傳感器的數據生成模塊,為多模型機動目標跟蹤算法提供良好的檢測平臺。
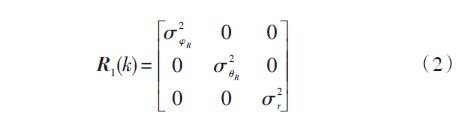
毫米波雷達導引頭的觀測數據包括觀測系下的視線方位角、視線俯仰角、彈目距離、多普勒頻率、雷達信噪比等信號。經過坐標轉換,得到的參考系下的雷達觀測數據,建立如下雷達觀測方程:

φR為雷達視線方位角,θR 為雷達視線俯仰角,r 為彈目距離。V1(k) 是均值為零、協方差陣為R1(k) 的白高斯噪聲向量。
紅外成像導引頭的觀測數據包括觀測系下的視線方位角,視線俯仰角等信號。經坐標轉換得到參考系下的紅外觀測數據,建立如下紅外觀測方程:

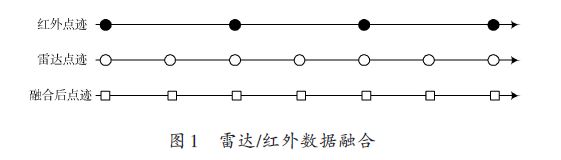
本文綜合應用點跡合并方法和點跡串行處理方法,搭建毫米波雷達和紅外數據融合的多傳感器平臺。假設雷達的掃描周期為5 ms,紅外的掃描周期為10 ms,所以首先將雷達和紅外點跡數據串行合并成為點跡數據流,進行點跡-航跡相關;對于在10 ms時刻,若雷達點跡和多個紅外點跡均與航跡相關上,則對這些點跡進行點跡壓縮合并,如圖1所示。